The PROFIdrive Controller example application should give an idea, how a PROFIdrive controller can be build up, handling drives with PROFIdrive interface.
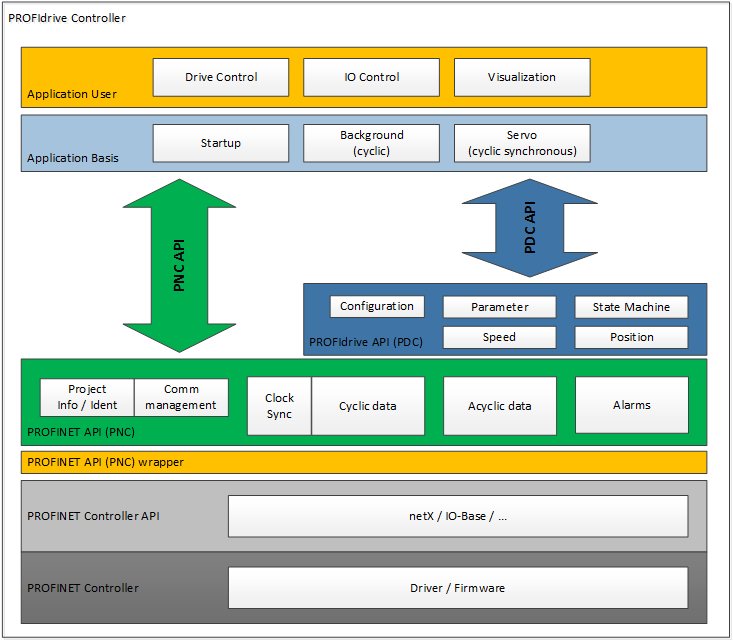
Inside example application there are two interface layers to
make usage of PROFIdrive devices, which are connected to a PROFINET
controller system, more easy.
The PNC API is used to provide PROFINET controller related functionalities like
cyclic, acyclic and alarm data handling at application layer in a standardized way.
So it is possible to use the whole application example on different runtime systems
by just implementing a proper wrapper for target system.
The PDC API is used to provide main PROFIdrive functionalities in a more abstract
way. It provides functions to run connected axis with velocity or position setpoints
with respect of chosen PROFIdrive application class and take over all necessary
normalization, calculation and mapping in internal modules.
The functionalities of PDC API are based also on PNC API functionalities.
The source code and documentation can be downloaded here:
| Application | Version | Status |
|---|---|---|
| PDCA | V1.0.0 | RELEASED |
| OS adaption | Version | Status |
|---|---|---|
| template | V1.0.0 | RELEASED |
Former versions can be found here:
| Application option | Source | Documentation | Version | Status | |
|---|---|---|---|---|---|
| PROFIdrive Controller AC1 | HTML (zip) | LaTex (zip) | V1.1.0 | RELEASED OUTDATED | |
| PROFIdrive Controller Isochronous operation | zip | HTML (zip) | LaTex (zip) | V2.1.0 | RELEASED OUTDATED |
| PROFIdrive Controller AC4 | zip | HTML (zip) | LaTex (zip) | V3.1.0 | RELEASED OUTDATED |
| 2017-01-23 | new PROFIdrive Controller Application is available for download for all project members. |